Powering Industrial Automation and Robotics
Nowadays, robotics and automation systems will typically play a part in how businesses build their products. This includes almost everything from cars and smartphones to medical devices and military tech. In modern factories and warehouses, industrial automation systems and robotics play a vital role in safety and productivity.
Of course, like any advanced technology, industrial robotics systems require a reliable and efficient power supply to deliver the expected results.
At the heart of these systems lies the power supply, which, if poorly chosen, can degrade performance, reduce reliability, and risk downtime. In this article, we dive into the features that make a power supply suitable for use in industrial robotics and automation systems, including the key technical challenges for designers.
What are automated industrial robots used for?
Industrial robotics systems typically bring together actuators, sensors, control electronics, communication modules, safety circuits, and peripherals to support a wide variety of processes.
Automation systems are often of high importance to industrial workflows and supply chains, resulting in significant disruption when things go wrong. A past client of Wall Industries, a manufacturer of distribution equipment, was struggling with power supply failures and conveyor belts breaking under excessive weight. Our team restored the reliability of the warehouse distribution system with a custom power supply with high-input surge ratings that could operate comfortably in the environment.
How do Industrial robots work?
Industrial robots are designed to perform specific tasks or functions, which influences their structure and software program. Depending on the type of robot, an industrial robot will perform its functions by using arms, actuators, and/or wheels.
The most common type of industrial robot features a rotating arm with one or more joints that allow it to execute a wide range of motion. Typically, these arms can move along six axes: left/right, side-to-side, and backwards/forwards. However, the real flexibility of these robots comes in the various End of Arm Tools (EOATs) that can be affixed to the robotic arm. Operators can switch between different EOATs to allow the robot to fulfil different functions throughout the workday.

Multifunctional Robot Arm
Industrial robot examples and types
There are many classifications of robots based on their arm type, the role they fulfil, and how they move around the business premises. For instance, a SCARA robot features an arm that mimics the motion of a human arm through two twisting joints. Each kind of industrial robot has its own benefits and limitations, making it suitable for specific tasks and processes.
Highlighted below are some of the different types of industrial robots and their benefits.
Types of Industrial Robotics
|
Type of Industrial Robot |
Typical Applications |
Photo |
Description |
Benefits |
| Linear Robot | • Sorting • Palletizing • Assembly • Pick and Place • Packaging |
|
Moves in a straight line and features two to three axes |
•Accuracy • Quick Reprogramming |
| SCARA Robot | • Pick and Place • Assembly • 3D Printing • Dispensing • Engraving • Handling • Screw Driving/Tightening |
|
Selective Compliance Assembly Robot Arm (SCARA) that can extend and retract like a human arm |
• Accuracy • Speed • Compact |
| Articulated Robot | • Welding • Assembly • Part Transfer • Packaging • Machine Loading • Palletizing • Pick and Place • Material Handling |
|
Features four to six axes which provides a wide range of movement |
• Accuracy • Speed • Wide range of movement |
| Parallel Robot | • Flight Simulation • Automobile Simulation • Milling Machine • Picking and Placement |
|
Features a single base with multiple linear actuators |
• Accuracy • Reliability • Multiple Applications |
| Cylindrical Robot | • Welding • Assembly • Palletizing • Packaging • Injection Molding • Machine Handling |
|
Features a rotary joint and a prismatic joint for angular motion around a joint axis |
• Speed |
| Automated Guided Vehicles | • Raw Material Handling • Part Delivery • Finished Goods Movement • Warehouse Distribution |
|
Warehouse vehicle that can move materials and is controlled by a computer |
• Speed • Safety • Efficiency • Cost Effective |
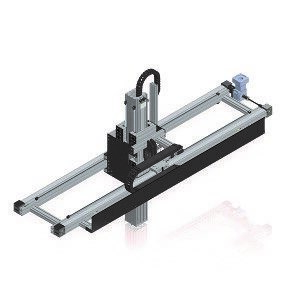 Image source:
Image source: 
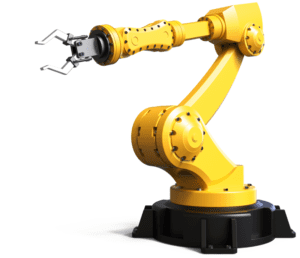
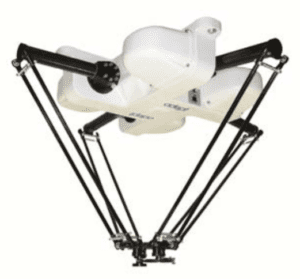
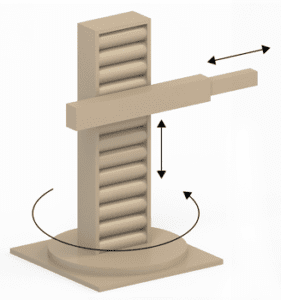
 Image source: shutterstock.com
Image source: shutterstock.com
Key Technical Requirements for Automation / Robotics Power Supplies
When evaluating and specifying a power supply for automation or robotics, these are the criteria worth digging into:
-
Transient Response & Dynamic Load Handling
Motors or solenoids can create instantaneous current demands. The power supply needs to absorb or supply these spikes without voltage droop or overshoot. Key specs to look for include output impedance, load transient recovery time, and peak current rating beyond the supply’s steady-state.
-
Hold-Up / Energy Buffering
If the system faces brief interruptions (voltage sags or short outages), the supply must maintain system rails for enough time to perform safe shutdown or mode transitions. This means prioritizing energy storage, capacitor size, and proper backup switchover logic.
-
Redundancy & Fault Isolation
In mission-critical automation, power systems are often built with redundancy, such as dual supplies and hot-swappable modules. Isolating faults (shorts, overcurrent) is essential so one failure doesn’t lead to others.
-
Isolation & Safety Standards
Supplies must meet industrial safety regulations and isolate control circuits from high-voltage or power domains. Look for reinforced or double insulation, safety certifications (e.g. UL, IEC 62368, IEC 61010), and leakage current specs.
-
Efficiency, Thermal Management & Size
High efficiency reduces internal losses (which become heat). Lower heat simplifies thermal management and extends life in tightly packed enclosures. Compactness matters when space is limited.
-
EMI / EMC Resilience
Supplies must be immune to external interference and not emit excessive noise themselves. Features to check:
- Input and output filtering
- Shielding
- Common-mode rejection
- Compliance with IEC 61000 series (e.g. 61000-4-2, 61000-4-3, 61000-4-5)
-
Environmental Ratings
Industrial settings may expose components to vibration, temperature swings, dust, humidity, corrosive gases, etc. Select supplies rated for industrial ambient conditions, shock/vibration tolerance, mechanical ruggedness, and wide temperature ranges.
-
Modularity & Scalability
In many cases, power demands grow or change. Modular supplies allow adding capacity or swapping modules without redesigning the whole system.
-
Control, Monitoring & Diagnosis
Modern systems benefit if the power supply supports telemetry (voltage, current monitoring, status, fault alerts). This supports preventive maintenance, design diagnostics, and remote monitoring.
Challenges & Tradeoffs in Real-World Deployments
Context has a massive influence on the effectiveness of power supplies when they’re used in real-world applications. Some of the practical challenges engineers face when integrating power systems in automation/robotics:
- Space vs. cooling vs. performance: A small supply may overheat if pushed; a larger one takes up space and costs more.
- Balancing cost and over-spec’ing: Oversize too much, and cost is wasted; underspec, and you risk failures.
- Interfacing with battery systems: For mobile robots/AGVs, power management must handle both mains and battery, charging, switching, and smoothing seamlessly.
- Grounding and signal integrity: Poor grounding or shared returns can create noise coupling, especially around motor drives and sensors.
- Obsolescence & supply chain constraints: Relying on niche power modules that go end-of-life can be risky, although design flexibility or source diversity will help.
- Custom requirement vs off-the-shelf: Some systems need bespoke voltages, protections, and form factors, which can require custom or semi-custom supplies from design specialists.
Power supplies for robotics applications
Many robots will be able to function with a standard industrial 24VDC power supply, which has become the norm for automation systems for reliability, efficiency, and compatibility reasons. However, this won’t always be sufficient depending on the power demands of the system. On top of this, there may be specific considerations for your end application, such as operating in high-temperature environments.
If you’re struggling to find a solution that’s tailored to your exact needs, it can be worth exploring modified or custom industrial power supplies. We have created power solutions for optimal performance in challenging industrial environments, supporting a wide range of automation systems. This includes water purification, conveyor belts, an automated screwdriver system, and more.
Power supplies for industrial robotics: Key considerations
Power supplies play an important role in the proper operation of industrial robotics. Most industrial robots will be powered by a battery source, either chargeable or non-rechargeable. The power supply will help deliver power to different components, like a motor drive or inverter circuit within the robotic circuit. Power supplies may even need to be paired with a specialized component, such as a transceiver, in order to function correctly.
The power supply you choose for your industrial robot will need to be:
- Compact and isolated. Most industrial robots will have significant space and weight constraints you will need to meet when considering a power supply. You’ll also want to ensure there’s no risk of interference between the power supply and the other components in order to meet power supply safety standards.
- Highly efficient. The more efficient your power supply, the lower your energy costs will be. Additionally, an energy efficient power supply will require less maintenance and likely last longer, further reducing your overall operating costs.
- Fast to start up. Minimizing downtime is vital to making the manufacturing process as efficient as possible. A fast start up time for your power supply will help increase productivity and adaptability, while reducing wear and tear and enhancing system responsiveness.
- Low standby power consumption. Whether you’re looking to meet your sustainability goals, extend component lifespan or just ensure compliance with energy efficiency regulations, reducing standby power consumption is key.
There are a number of other questions you’ll want to consider when selecting a power supply for industrial robotics. There may be specific requirements you’ll need to factor in depending on your application – for instance, if your industrial robot will need to operate in high-temperature environments.
Needless to say, finding a robotics power supply that’s tailored to your exact needs is no easy feat. Depending on your specific application, you may need to explore a modified or custom industrial power supply solutions.
Choose Wall Industries for your industrial robotics power supplies
Finding the right power supply for your industrial robot is vital to avoid production slowdowns, additional expenses, and safety problems. But this is easier said than done. There are a wide range of factors to consider, from energy efficiency to size and weight, as well as application-specific issues you might face.
Consulting with industry-leading experts can alleviate some of the challenges in finding the right industrial robotics power supply. At Wall Industries, we’ve been designing and manufacturing industrial power supplies for more than 60 years. Our high-performance team is committed to engineering excellence, so get in touch to find out how we can help you.
You can also visit our industrial robotics product page or take a look at our robotics brief for more information.